

CONTRéLEUR DE VOL KK 2.1.5 modéle 3D
CATEGORIE: RC & DRONES 🚁
8 500 DA
DETAILS
Détails de micrologiciel:
La prochaine évolution de la révolution du rotor est ici !! Le KK2.1 emballe une nouvelle puissance trouvée avec des capteurs, une mémoire et des broches d'en-tête mis à jour.
Conçu par le grand-père de la révolution KK, Rolf R Bakke, le KK2.1 est l'évolution des planches de contrôle de vol KK de première génération. Le KK2.1 a été conçu à partir du sol pour apporter un vol multi-rotor à tout le monde, pas seulement aux experts. L'écran LCD et le logiciel intégré facilitent l'installation et la configuration. Une foule de types d'artisanat multi-rotor sont préinstallés, il suffit de sélectionner votre type d'artisanat, de vérifier la disposition du moteur/la direction de l'hélice, de calibrer vos ESC et votre radio et vous êtes prêt à partir ! Tout cela se fait avec des instructions faciles à suivre à l'écran !
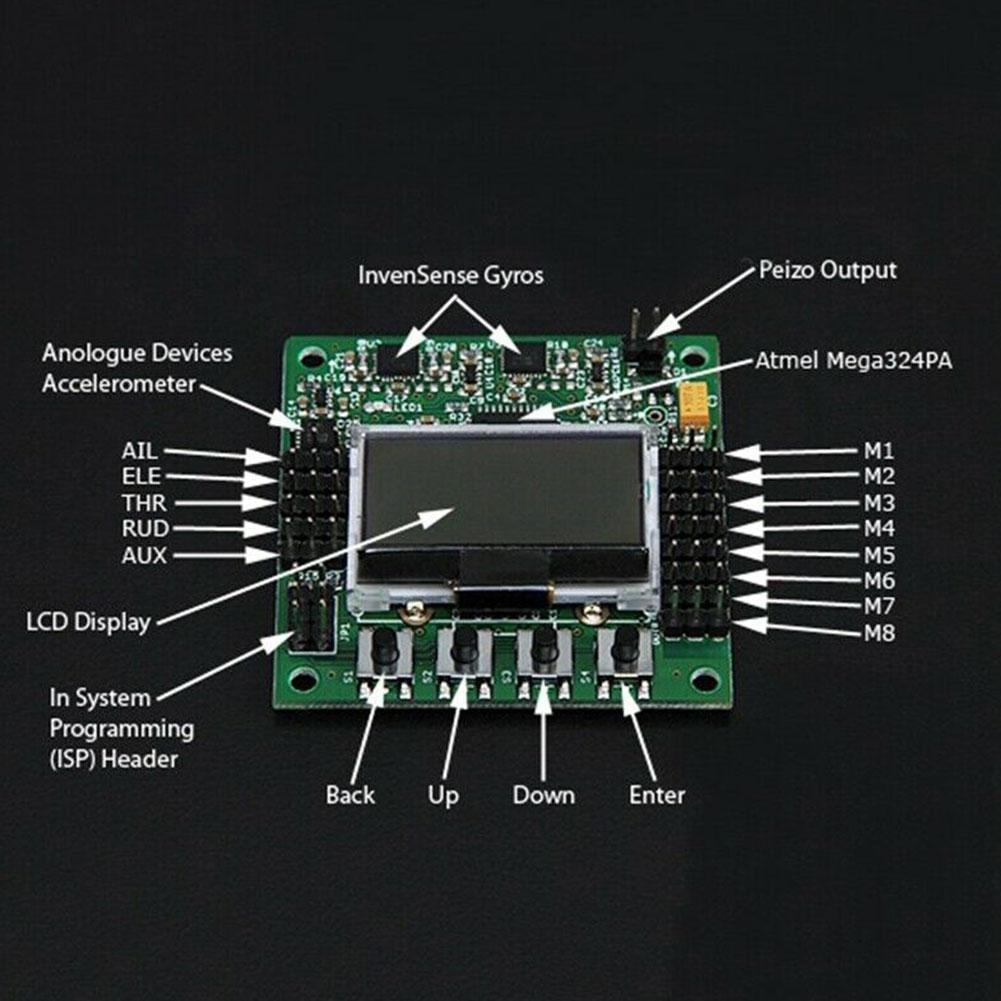
Le système KK gyro original a été mis à jour pour devenir un système 6050 MPU sensiblement sensible, ce qui en fait la carte KK la plus stable de tous les temps et permet l'ajout d'une fonction de niveau automatique. Au cœur du KK2.1 se trouve un microcontrôleur Atmel Mega644PA 8 bits AVR RISC avec 64 k de mémoire. Un en-tête supplémentaire a été ajouté pour la détection de tension, donc pas besoin de soudure à bord. Un buzzer piézo-électrique pratique est également inclus avec la carte pour un avertissement audio lors de l'activation et de la désactivation de la carte.
Si vous êtes nouveau dans le vol multi-rotor ou que vous n'êtes pas sûr de la façon de configurer une carte KK, le KK2.1 a été construit pour vous. L'interface de programmation 6 broches USBasp AVR garantit que les futures mises à jour logicielles seront rapides et faciles.
Caractéristiques:
- Taille: 50,5 mm x 50,5 mm x 12 mm
- Poids: 21 grammes (sonnerie piézo-électrique incluse)
- CI : Atmega644 PA
- Gyroscope/Acc : 6050MPU InvenSense Inc.
- Niveau Auto: oui
- Tension d'entrée : 4,8-6,0 V
- Interface AVR : norme 6 broches.
- Signal du récepteur : 1520us (5 canaux)
- Signal à l'esc : 1520us
Version du micrologiciel : V1.17S1 :
- Micrologiciel pré-installé.
- Double hélicoptère
- Tricoptère
- Y6
- Quadrirotor +
- Quadrirotor X
- Hexcoptère +
- Hexcopter X
- Octocoptère +
- Octocoptère X
- X8 +
- X8 X
- H8
- H6
- V8
- V6
- Aileron Aero 1 S
- Aileron Aero 2 S
- Aile volante
- Monocoptère 2 M 2 S
- Monocoptère 1 M 4 S
(Mélange personnalisé via l'option "mélangeur éditeur")
L'éditeur de mixeur vous permet d'ajuster où et combien de signal les moteurs reçoivent de l'entrée de bâton et des capteurs. Cela vous permet de créer n'importe quelle configuration possible avec jusqu'à 8 moteurs ou servos.
Qu'est-ce qu'une carte de commande multi-rotor que vous demandez ?
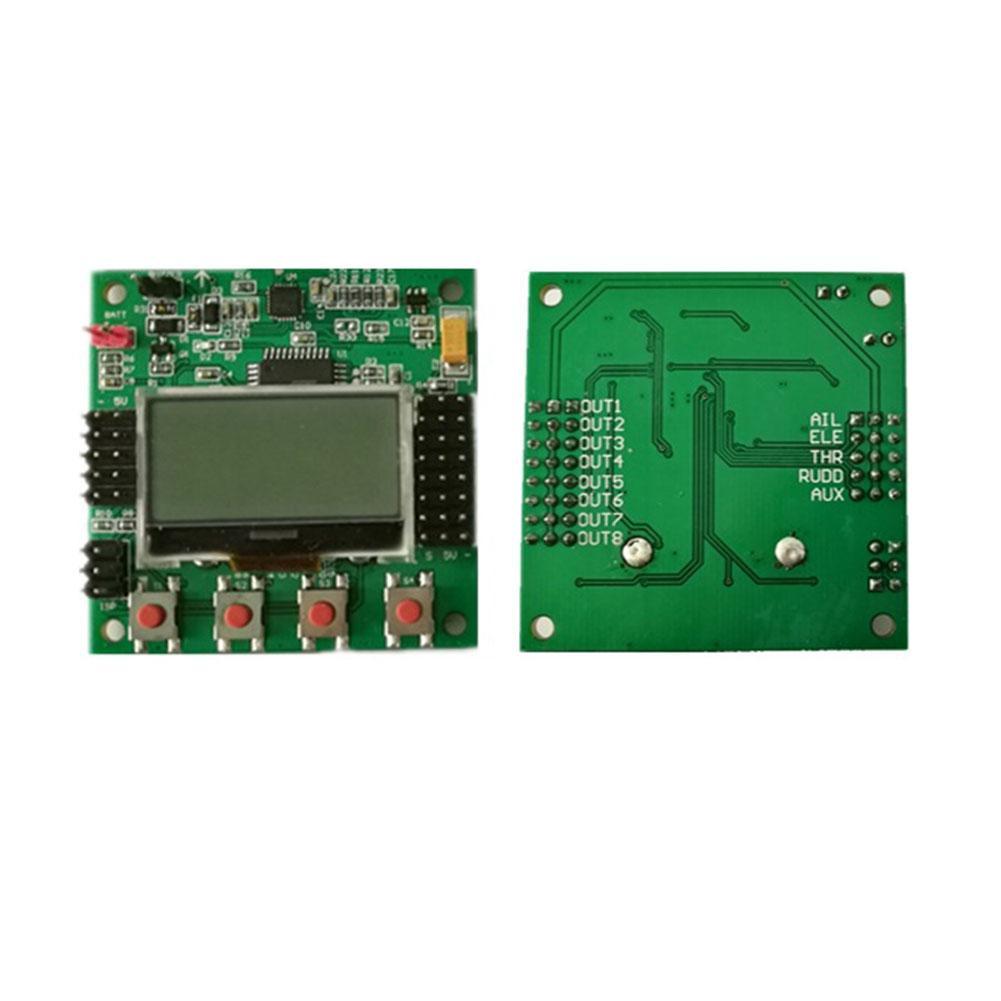
Le régulateur multi-rotor KK2.1 est une carte de commande de vol pour avions multi-rotor (tricopteurs, Quadcopters, Hexcopters, etc.). Son but est de stabilisateur l'avion pendant le vol. Pour ce faire, il prend le signal du gyro/acc 6050MPU (rouleau, pas et lacet), puis passe le signal au IC Atmega644PA. L'unité IC Atmega644PA traite ensuite ces signaux en fonction du micrologiciel sélectionné par les utilisateurs et transmet les signaux de contrôle aux contrôleurs de vitesse électroniques installés (ESC). Ces signaux donnent des instructions à l'escs de faire des ajustements fins à la vitesse de rotation des moteurs qui stabilisent à leur tour votre embarcation multi-rotor.
La carte de commande KK2.1 multi-rotor utilise également des signaux de votre récepteur de systèmes radio (Rx) et transmet ces signaux à l'ic Atmega644PA via les entrées aileron, ascenseur, accélérateur et gouvernail. Une fois ces informations traitées, le ci enverra des signaux variables aux ESC qui ajustent à leur tour la vitesse de rotation de chaque moteur pour induire un vol contrôlé (haut, bas, arrière, avant, gauche, oui, lacet).



